There were a lot of updates over the last months and now it’s time to do a new release; PI-ENV_V0.0.3 happened today.
This is the last Release for now -> i`m not happy with the DockerPi modul
So i do not plan to develop it further.
There were a lot of updates over the last months and now it’s time to do a new release; PI-ENV_V0.0.3 happened today.
This is the last Release for now -> i`m not happy with the DockerPi modul
So i do not plan to develop it further.
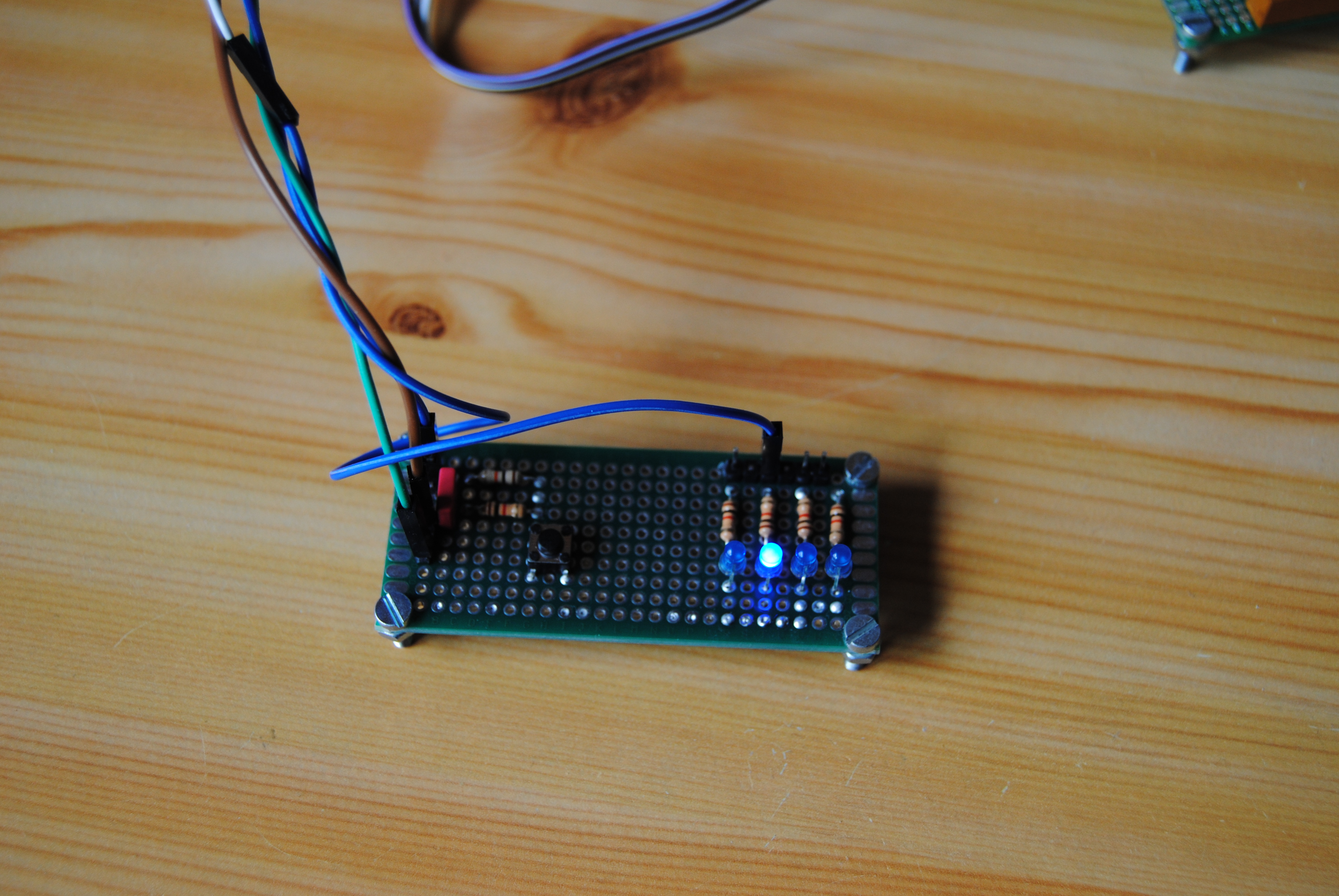
I started a new project to track things like temperature and more in my home and outside. My actual development environment is quite simple:

In my github repo (https://github.com/tjohann/ambient_tracking_with_raspi ) you can find more informations about it.
As always the first step is a linux image based on void-linux like in A20_SDK. You can find the tarballs on sourceforge. To make it easy, you also find the already known helper tools in the script folder.
The software will have at least 3 different compoments, one for the LCD handling, one for the SensorHub handling and one which brings it all together.
Now i start to prepare the LCD stuff. So stay tuned.
Hi@all,
the release of A20_SDK_V2.8.3 happened … Don’t forget to do a make mrproper && make init_sdk … also do a make get_toolchain … it is updated to the latest void-linux versions.
Note: this is an in between release to A20_SDK_V2.9.0 which also provides new device images.
Cheers
Thorsten
Hi@all,
after some long time of thinking about a switch back to slackware, i decided to give it a try. The arm slackware port seems to work quite good. So will i prepare some imagess for a bananapi (full and small) and check if it works as expected 🙂
I guess that the switch will happen during Christmas vacation.
Cheers and have fun …
I already mentioned that i want to reduce the effort regarding RT-PREEMPT kernel. So pls note, that you can run into trouble if the dtbs of RT-PREEMPT and PREEMPT kernel are not the same. If so, then pls follow the instructions on howto build a kernel (see ./olimex/Documentation/howto_kernel.txt).
Due to the fact that not every kernel support the RT-PREEMPT patch (4.7.x/9.x/11.x/…), i will reduce the effort to support hart realtime kernel. For all the newer devices like nanopi and cubietruck-plus, i need the latest kernel. This lead to different kernel versions and therefore problems regarding devicetree. Netherless, i will support the latest RT-PREEMPT for Olimex. This is my main embedded device, so it makes sense to have RT-PREEMPT added. But be aware that you have to build your own kernel or at least dtb.
I did some cleanups and rethink some topics. The RT-PREEMPT stuff brings a lot of work and only small benefit. So i decided to support it only as an option.
NEW entry:
RT-PREEMPT kernel is the main kernel only for olimex (bananapi
uses also PREEMPT)
remove RT-PREEMPT support in base image (costs a lot of flash)
I added the configuration needed to share void-packages generated packages via baalue_master (see https://github.com/tjohann/a20_sdk/blob/master/bananapi/configs/exports … https://github.com/tjohann/a20_sdk/blob/master/bananapi/configs/fstab_hdd) … for general info about usage of nfs with void-linux see https://wiki.voidlinux.eu/Network_filesystem .
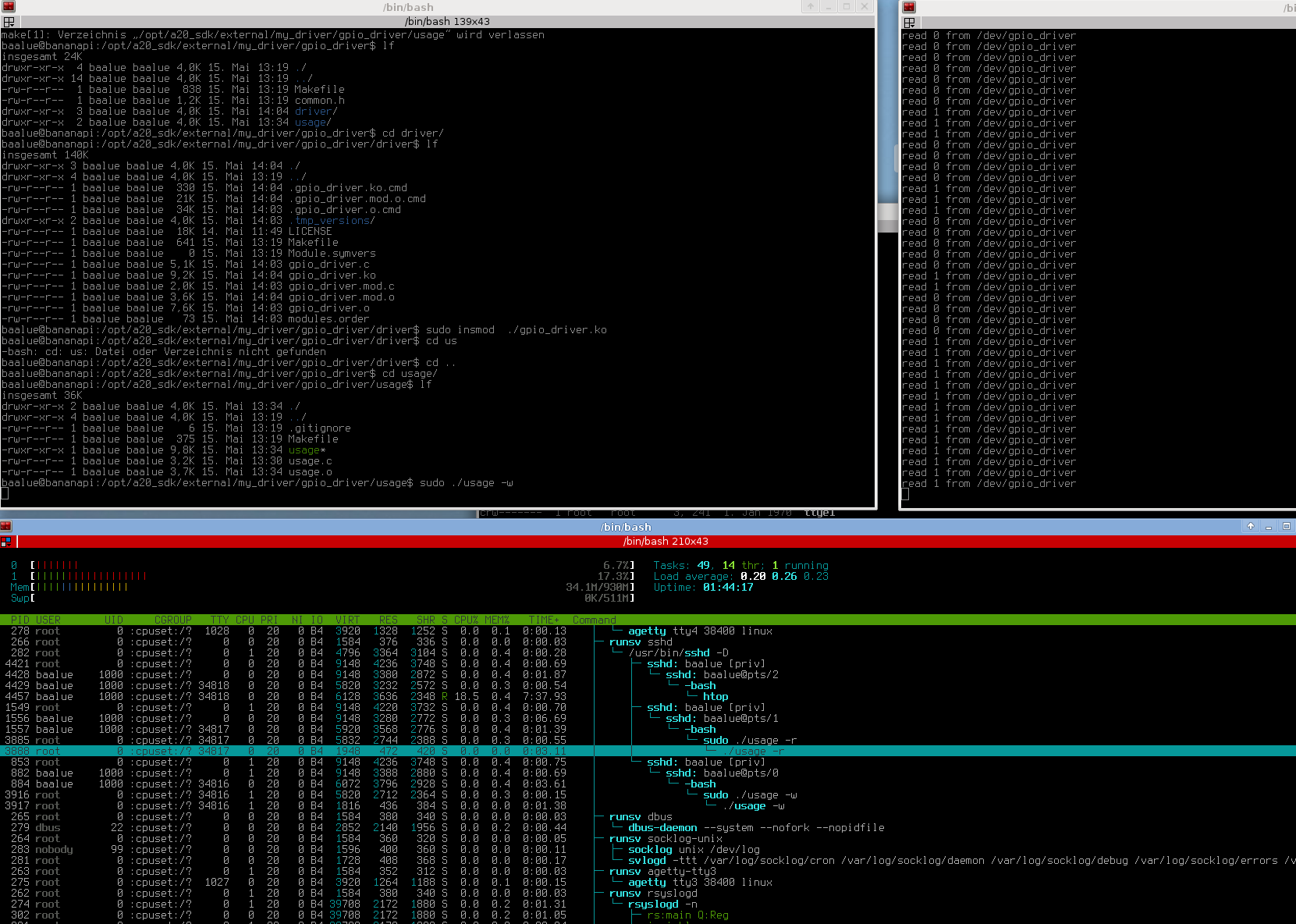
I did some testing with my gpio driver (https://github.com/tjohann/mydriver/tree/master/gpio_driver/driver) used by one of my time triggert (https://github.com/tjohann/time_triggert_env/blob/master/example_gpio.c) examples.
As you can see in the picture below I use my new Osziloskop for the timing measurements. The probe is connected to a LED over a 1kOhm Resistor (see https://github.com/tjohann/mydriver/blob/master/schematics/GPIO_LED_blau.png). The bananapi runs a minimal RT-PREEMPT kernel config with FULL-preemption (https://github.com/tjohann/a20_sdk/blob/master/bananapi/configs/kernel_config_4.4.x_minimal_rt).
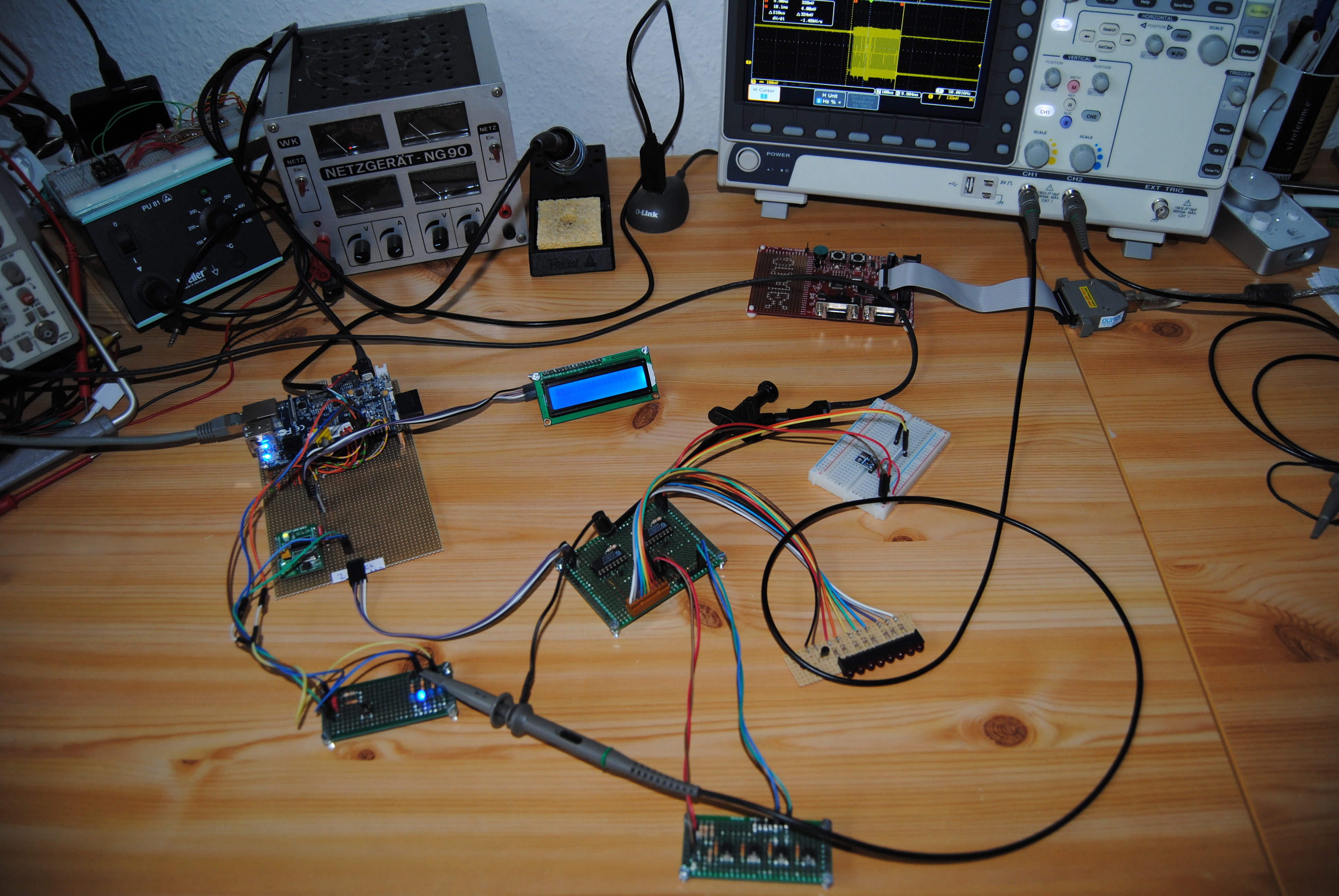
The examples cycle time of the example is 10ms instead of 750/500ms, so the LED is „on“:
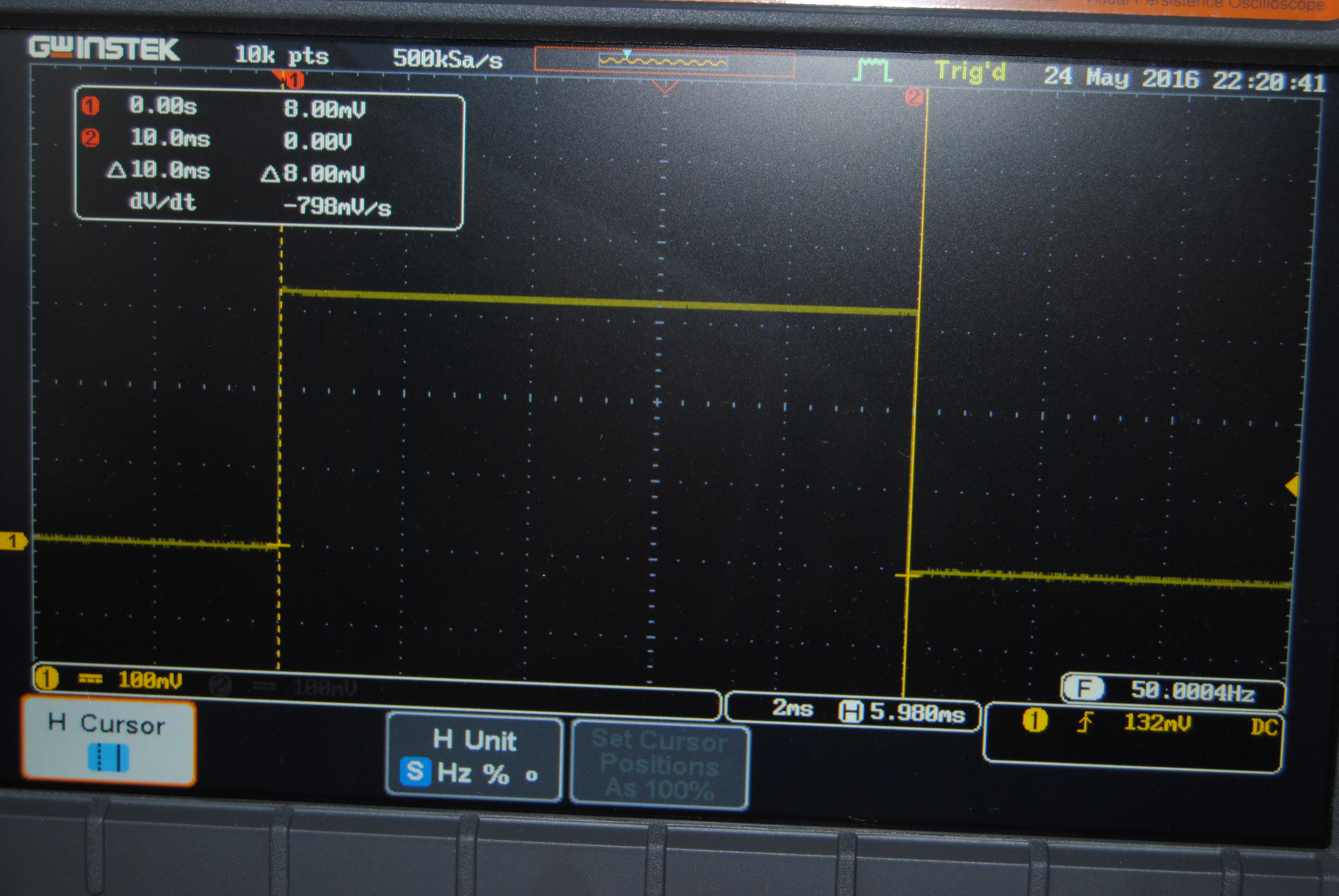
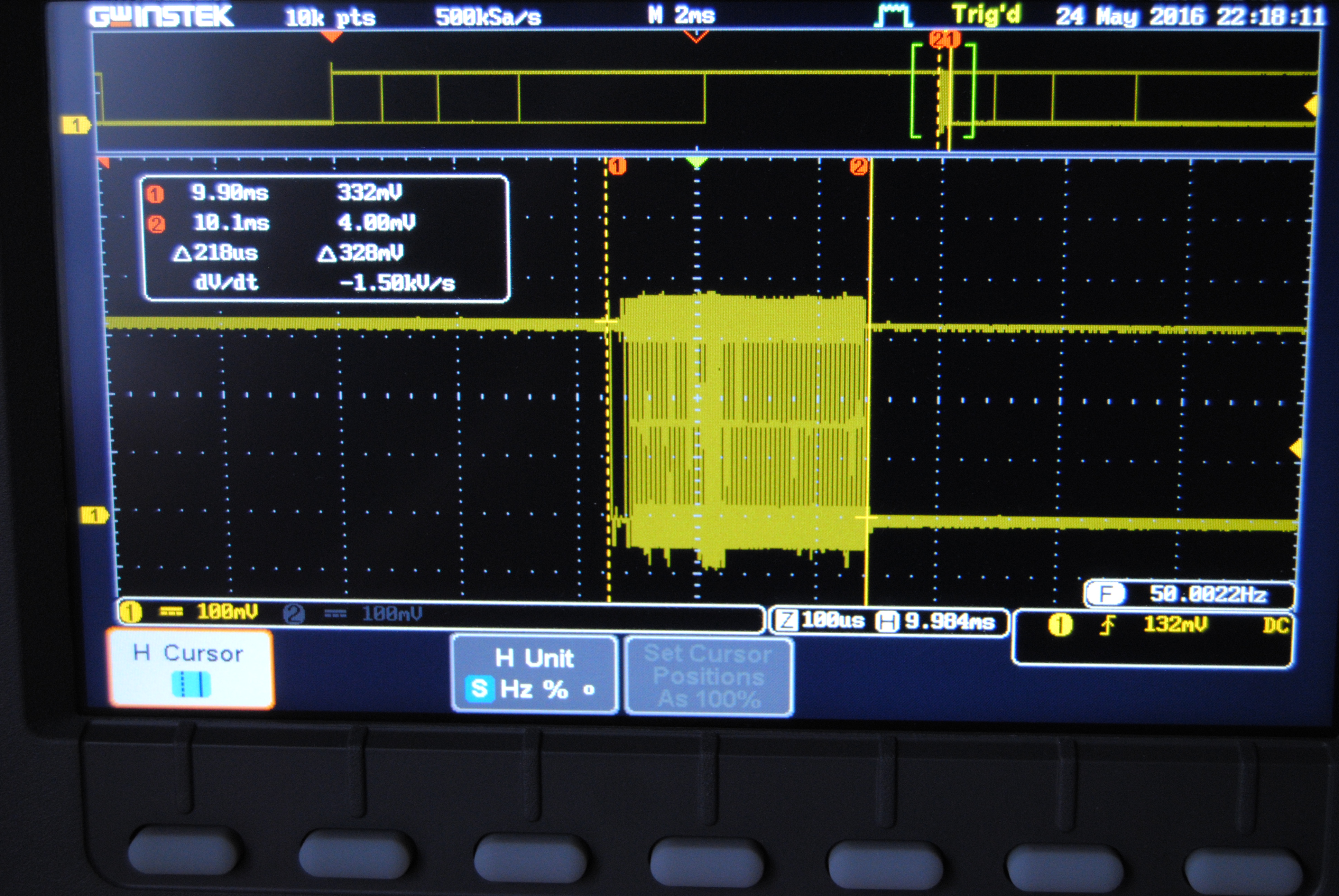
I want to measure how large the jitter will be in that configuration. The result is okay: ~200µs with a cyclic time of 10ms.
A first version of my int based gpio driver is working (https://github.com/tjohann/mydriver/tree/master/gpio_irq_driver)

{kind=link}